There are a lot of questions, I will answer them one by one.
Maybe the emergency part of the system I have spoken about is a little too complex for what I am hoping to create. I think the scope of the project should be limited to receive only, as this allows me to use familiar hardware, as I don’t know much about transmitting signals, so here is the new scope with all the details.
The scope is now just a redundant weather and general information index for Skylark software, if in need of up to date weather or general world news, you can use this “computer” to access this.
Another thing that I was thinking about recently is a gyroscopic auto aligner for the antenna, I have used something similar while working at university, we used a raspberry pi nano and a gyroscope that had a compass to firstly align with north, then cross reference the pitch of the antenna via a stepper motor to correctly focus on a satellite.
I think this could work if you had a database already in memory with relative satellite positions and earth (Longitude/Latitude) data. Again, I think this would also need a GPS for it to work correctly, so this is something to consider.
///////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////
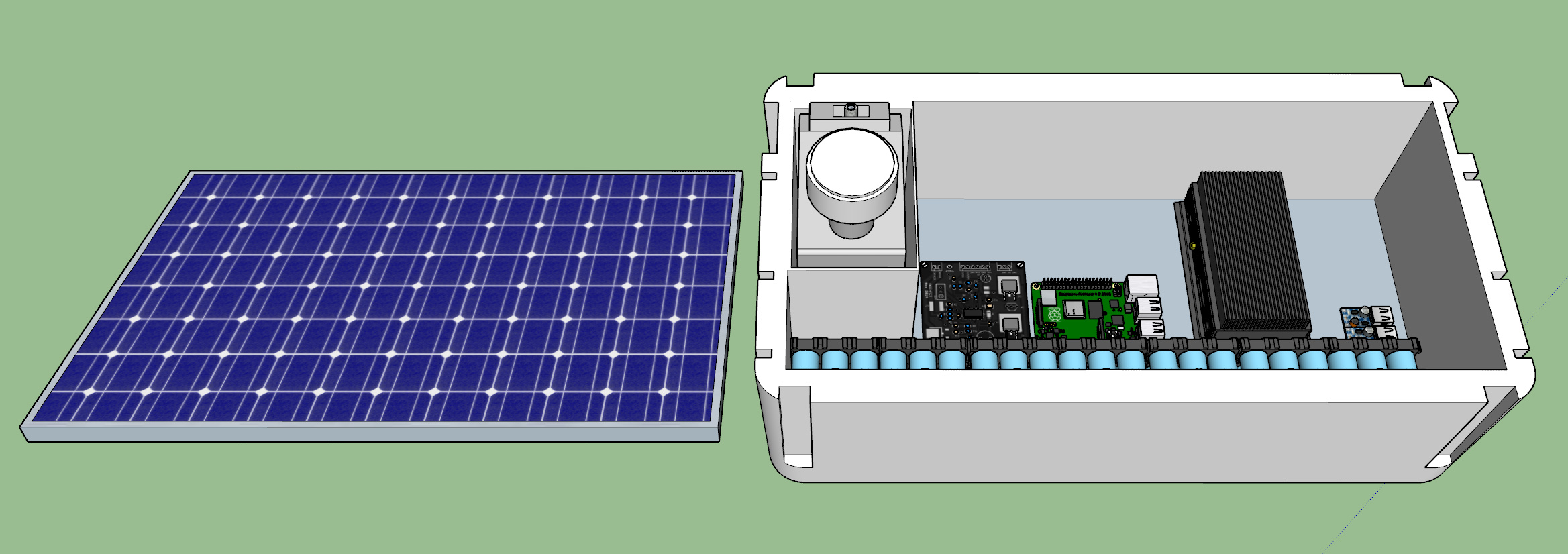
The size of the pelican style case would be as follows – Reference (iM2200 STORM CASE)
| Int. Length (mm) |
381 |
| Int. Width (mm) |
267 |
| Int. Depth (mm) |
152 |
| Int. Lid Depth (mm) |
51 |
| Ext. Length (mm) |
411 |
| Ext. Width (mm) |
322 |
| Ext. Depth (mm) |
168 |
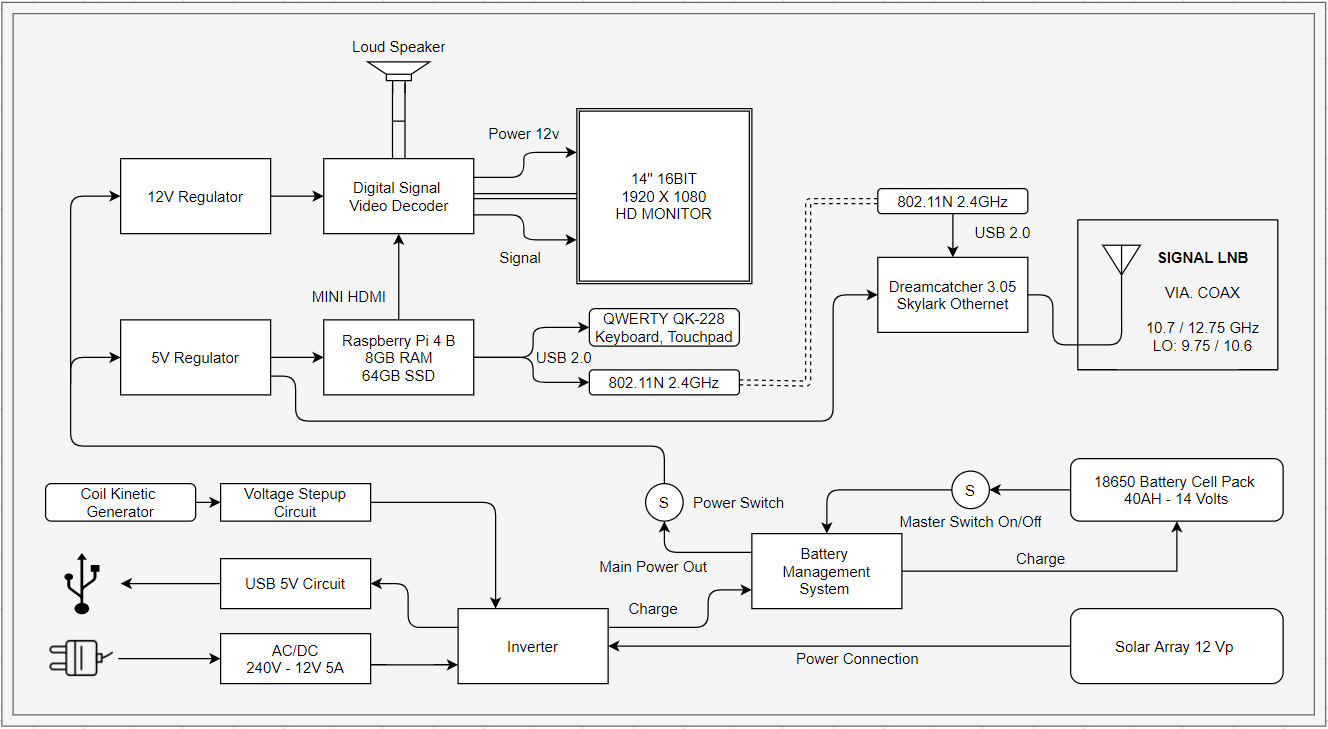
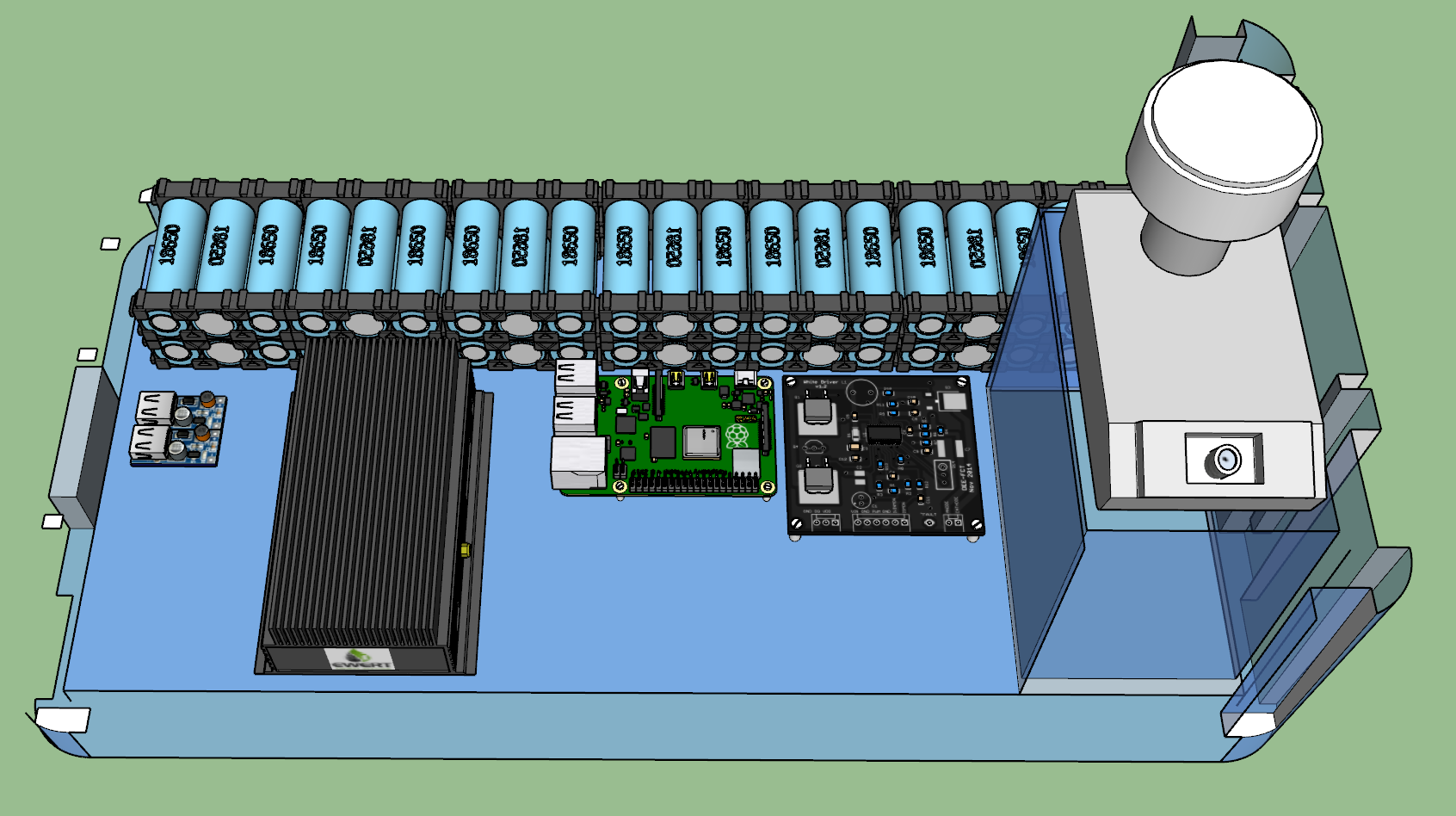
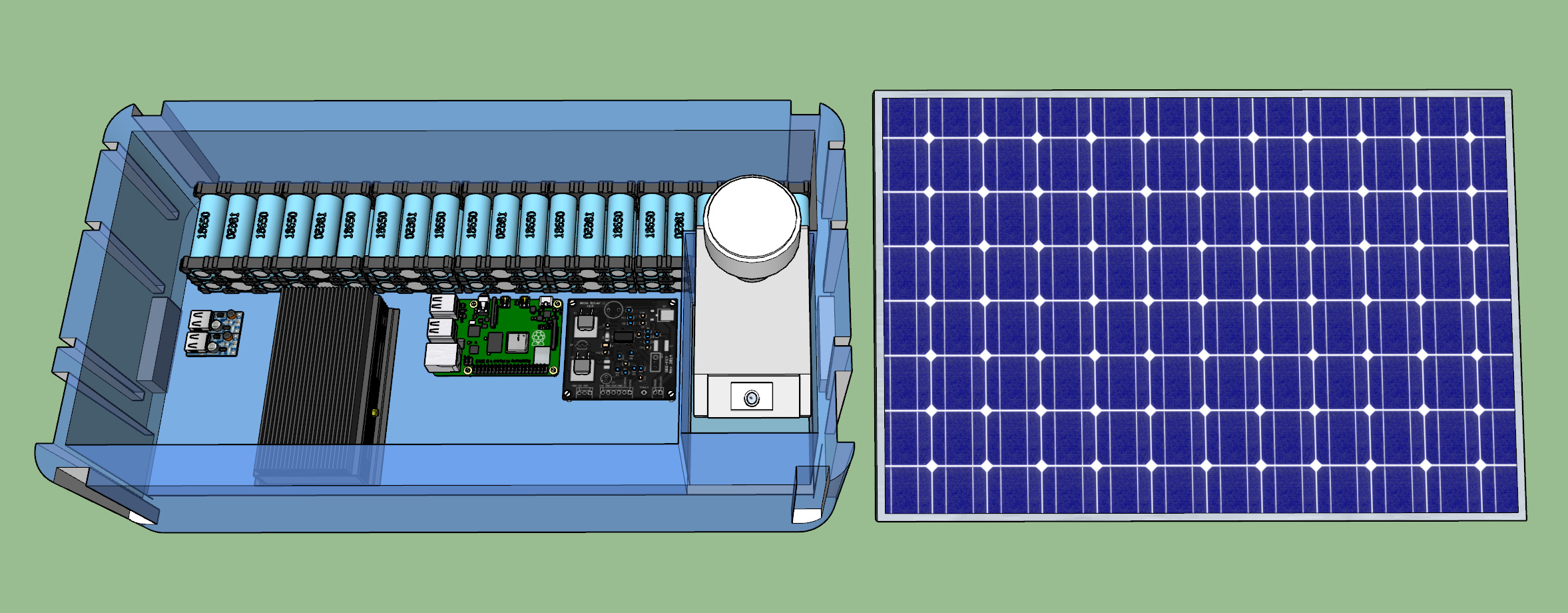
The battery is going to comprise of a 10Ah Battery made from 18650 cells running at 12v it will be connected to a BMS > Inverter (Solar Charging) > 5V step down to USB output.
1 = USB Power output (Predefined) – Raspberry Pi Computer
1 = USB Power output (Predefined) – Dreamcatcher v3.05
1 = 12v Power output ^ Inverter (Predefined) – laptop Screen Touch screen (Waterproof)
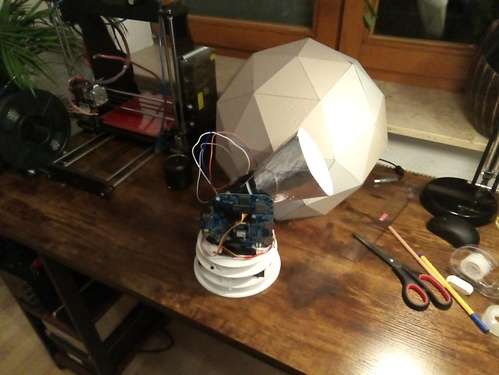
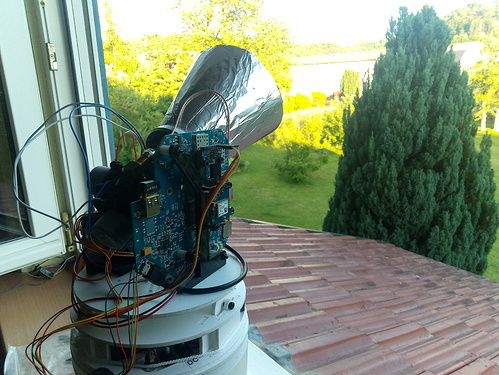
The Raspberry Pi computer will be used to interface with the Dreamcatcher device though a WI-FI module connected to the Raspberry Pi, the PI will then display the information of the skylark system to the monitor via HDMI.
Connected to the raspberry pi will be a USB keyboard mouse combo (similar to the old ThinkPad (nipple mouse) this will be covered in a rubber waterproof layer >
This will be used to interface with the Raspberry Pi computer. Running an OS (Android or Linux).