Unfortunately not yet. The part with the battery is still missing because the lowest layer just won’t fit into the hole. I need to make a new one with the CNC first. But there are no LEDs in my setup plus the transparent ball would not light up in the dark like a white one. I don’t have a lot of time at the moment to work on it, but I’ll make a video when its ready.
I love this, very creative and ultra functional.
I have been thinking about how to make a knock-off beach ball satellite dish form one of the 2m mega-beachballs. maybe slice a 1.5m one at the equator and add an aluminum urethane painted ‘dish’ cut out from a 2m ball dissolve the extra form the 2m ball to make glue and aptches to reassemble(also steal the valve form the 2m ball to do higher pressure on the top side to ‘dish’ the inner aluminized dish) for a great field QO-100 rig(if I ever get to doing a dxpedition).
Good evening, I didn’t post here for a while, but I am still working on improving my tracker.
I made a new base with batteries, switches, a charging plug, and a mounting thread. It is now working again and I will still do a video of the setup with the beach ball. Butt the switches and stuff are all drilled through the base of the inspection hatch. I noticed that the beach ball was losing air over time, which is not very practical for long time use. I don’t know if the air escapes via the switches or the seal of the inspection hatch.
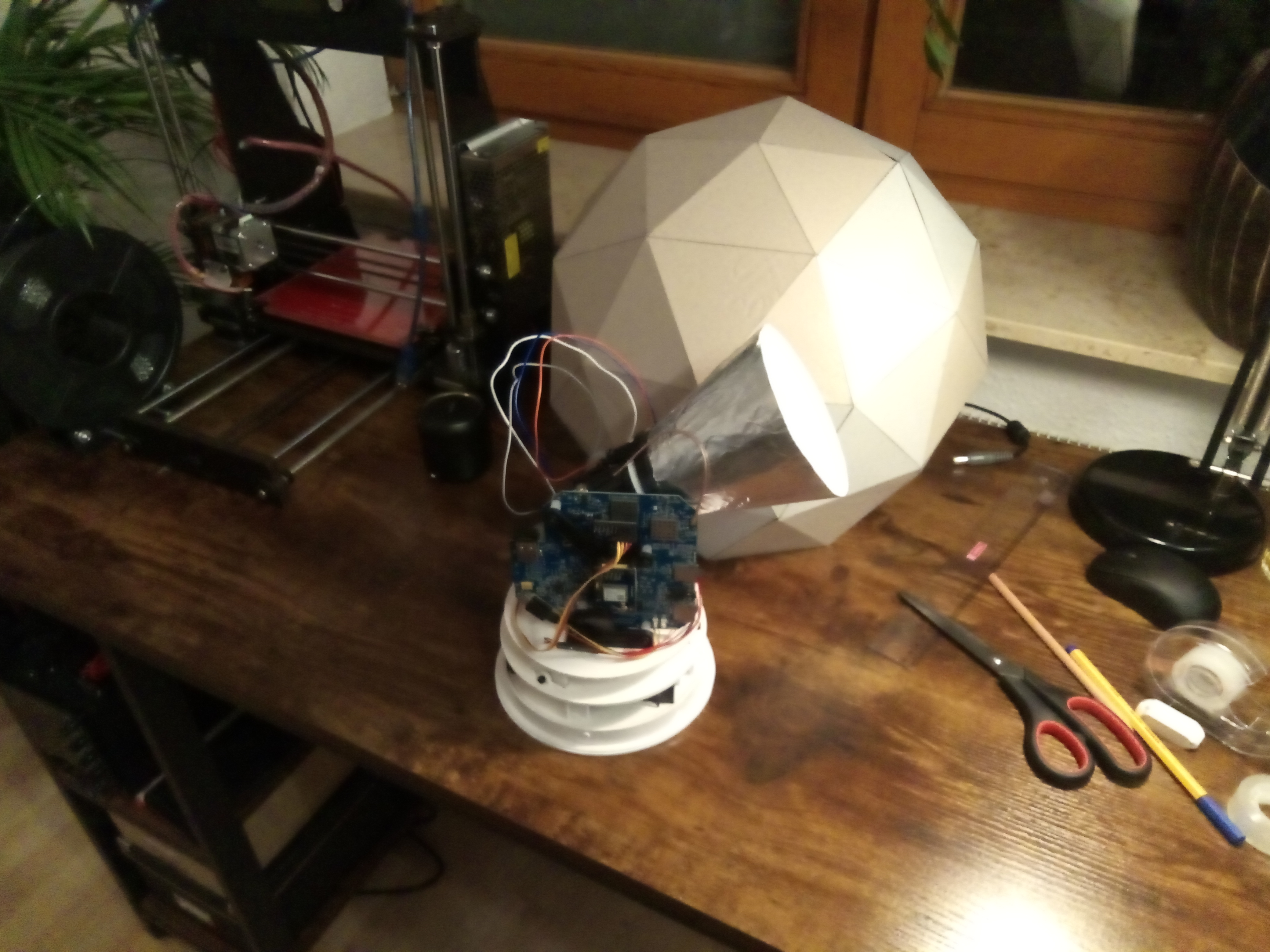
I will now try a geodesic sphere as a case. The one on the picture is made of cardboard pizza boxes as a template for a test fit, but I will make it of the same white board as the CNC parts of the tracker. This should solve the stability issues of the beach ball and still be waterproof enough with the inspection hatch in its base.
2 Likes

Here is the tracker mounted in the sphere. One panel is missing so I can check how it is doing inside. But everything is moving as it should so I guess I can make a plastic one in this size.
5 Likes
Hey Martin
Did you 3D print the parts? What did you use to drive the servos. I’ve tried doing something with the Adafruit Stepper driver with quite meagre results. Considering how smooth the movement is on yours I’d love to know more about the components you used. Are you planning on publishing (or licensing) the design?
@Sgtpepper Some Parts are 3D printed, some are CNC milled. To drive the stepper motors I used the ULN2003. The motors usually come with driver boards that are based on the ULN2003 as well. The first versions used these boards but then I milled a PCB to make the electronics more compact. I am planning to make my design available once it is done. But it will still need a few changes. Probably also for the new Dreamcatcher version. At the moment I can’t do much because I am very busy at work and also the place where I usually go shopping for materials is closed because of the lockdown. My current design needs a dome to use a cone to improve the signal. But I am out of material to make the dome which is also very time consuming to build. And actually, the rigid dome will take much storage room which is scarce on my boat. So at the moment, I am also drawing an improved version that is more compact and robust. @Syed can you already tell us something about the dimensions of the new DC version so I can save some space for it in my CAD?
1 Like
As of now, it is 59mm x 52mm, but it might shrink a bit more.
1 Like
Great! Can I ask how high the board will be with the components on it?
The thickest part of the board is the F-connector, which is 11.5mm. Other than that, the thickest/highest part from the bottom of the PCB is 5mm.
I agree  , and thank you all for the collected information, still my question is , can we receive well in the middle of Atlantic or no? Raspberry Pi and Sdr To receive weatherfax, or is it worth to invest in dreamcatcher for their weather updates? Like most radio fans outhere is easy to get in ur car and test it in a forrest … unfortunately Atlantic or Pacific is a different story.
, and thank you all for the collected information, still my question is , can we receive well in the middle of Atlantic or no? Raspberry Pi and Sdr To receive weatherfax, or is it worth to invest in dreamcatcher for their weather updates? Like most radio fans outhere is easy to get in ur car and test it in a forrest … unfortunately Atlantic or Pacific is a different story.
Please we sailors need a trusted system onboard with no fancy antennas 
Kind regards
I think with othernet you will not be able to receive a signal in the middle of the atlantic because there is no sattelite coverage for this area. And without a fancy antenna you also won’t have a stable connection on a rolling boat running downwind in the trade winds. As for weatherfax with Raspi and SDR, I’ll write you a pn, because I think this topic is not the place for it.
Thank you so much, you are right about that easy solution, I will look into that right Radio for me, receiving signal far from land is not easy…
I seen many videos about the topic and thought RPi was easy but if the app does it with a regular Radio sound , omg no more cables 
Have a great day and sorry if my post interfere with othernet , thought for one moment was possible to receive data…
Some Sailors do use the expensive iridium Go or HF Mail service which are quite expensive
Cheers
cool topic … i had fun crossing the north Atlantic … i say that in jest… the warm waters can be decieving
1 Like